
Visit at the University of Stuttgart
On 11.06.24, Luca Furieri gave a talk in the Kolloquium Technische Kybernetik of the University of Stuttgart on “Learning to optimize with convergence guarantees”
On 12.06.24, he was hosted by Prof. Andrea Iannelli and visited the Institute of Systems Theory and Automatic Control.
Slides available at the link clicking on this post.
On 12.06.24, he was hosted by Prof. Andrea Iannelli and visited the Institute of Systems Theory and Automatic Control.
Slides available at the link clicking on this post.
23.12.2022
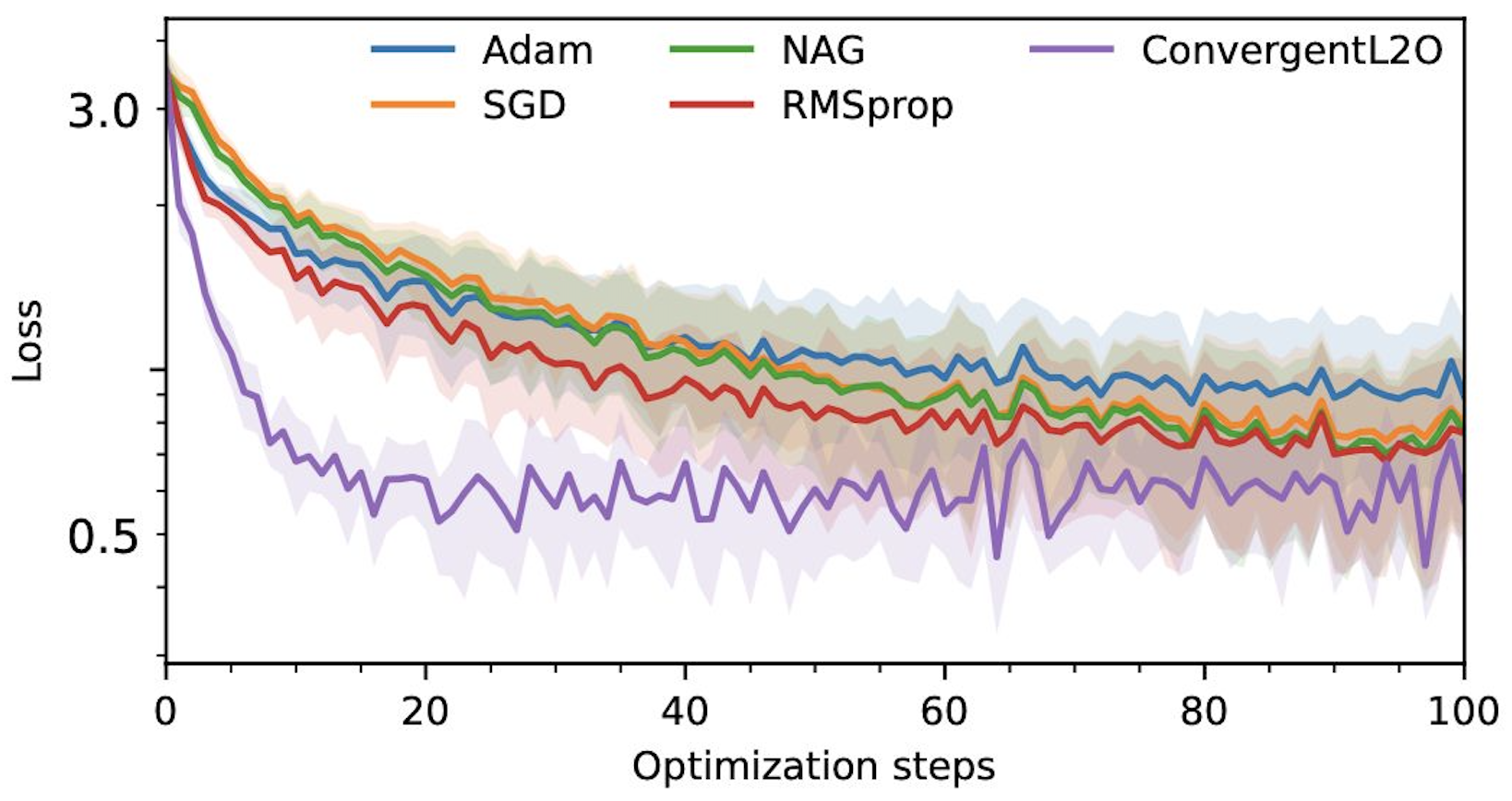
Learning to optimize with convergence guarantees — new preprint!
Fine-tuning optimizers for complex non-convex tasks can be a time-consuming challenge. Our recent research investigates a new approach: learning to optimize. Our method offers: guaranteed convergence, automatic performance improvement, generalizability to new problems.
Arxiv link: https://arxiv.org/pdf/2403.09389.pdf
Linkedin post: https://www.linkedin.com/feed/update/urn:li:activity:7175526641375268866/
Arxiv link: https://arxiv.org/pdf/2403.09389.pdf
Linkedin post: https://www.linkedin.com/feed/update/urn:li:activity:7175526641375268866/

3 papers accepted for the European Control Conference (ECC) in Stockholm!
The following papers were accepted for presentation and publication in the conference proceedings:
— “Closing the Gap to Quadratic Invariance: a Regret Minimization Approach to Optimal Distributed Control”, by Daniele Martinelli, Andrea Martin, Giancarlo Ferrari Trecate, and Luca Furieri.
— “Regret Optimal Control for Uncertain Stochastic Systems”, by Andrea Martin, Luca Furieri, Florian Dorfler, John Lygeros, and Giancarlo Ferrari Trecate
— “Unconstrained learning of networked nonlinear systems via free parametrization of stable interconnected operators”, by Leonardo Massai, Danilo Saccani, Luca Furieri, and Giancarlo Ferrari Trecate
— “Closing the Gap to Quadratic Invariance: a Regret Minimization Approach to Optimal Distributed Control”, by Daniele Martinelli, Andrea Martin, Giancarlo Ferrari Trecate, and Luca Furieri.
— “Regret Optimal Control for Uncertain Stochastic Systems”, by Andrea Martin, Luca Furieri, Florian Dorfler, John Lygeros, and Giancarlo Ferrari Trecate
— “Unconstrained learning of networked nonlinear systems via free parametrization of stable interconnected operators”, by Leonardo Massai, Danilo Saccani, Luca Furieri, and Giancarlo Ferrari Trecate

IEEE Conference on Decision and Control, 2023 — Daniele Martinelli presents his work
Daniele presents his work on “Unconstrained Parametrization of Dissipative and Contracting Neural Ordinary Differential Equations“, co-authored with Clara Galimberti, Ian Manchester, Luca Furieri, and Giancarlo Ferrari Trecate, at the 2023 CDC in Singapore!
Slides available at: https://www.lucafurieri.it/cdc23-presentation/
Slides available at: https://www.lucafurieri.it/cdc23-presentation/

Visit at Tokyo Institute of Technology
On 26.07.23, Luca Furieri gave a talk at the Tokyo Institute of Technology on “Reliable Deep Neural Networks and Regret Minimization for Optimal Distributed Control“.
Luca was hosted by Professor Takayuki Ishizaki for two days and had very interesting discussions on dependable modular control using neural networks.
Slides available at: https://www.lucafurieri.it/tokyotech-visit/
Luca was hosted by Professor Takayuki Ishizaki for two days and had very interesting discussions on dependable modular control using neural networks.
Slides available at: https://www.lucafurieri.it/tokyotech-visit/

Welcome to Daniele Martinelli
Daniele Martinelli joins the group !
Under the supervision of Dr. Luca Furieri and Prof. Giancarlo Ferrari Trecate, Daniele will pursue his PhD within the Ambizione project “Reliable Machine Learning for Networked Control”.
We look forward to seeing the exciting contributions that Daniele will make to the field of learning systems and distributed dynamical systems!
Under the supervision of Dr. Luca Furieri and Prof. Giancarlo Ferrari Trecate, Daniele will pursue his PhD within the Ambizione project “Reliable Machine Learning for Networked Control”.
We look forward to seeing the exciting contributions that Daniele will make to the field of learning systems and distributed dynamical systems!

IEEE Best Journal Paper Award for Luca Furieri and Maryam Kamgarpour
The NCCR members Luca Furieri and Maryam Kamgarpour have won the 2022 Best Paper Award in the IEEE Transactions on Control of Network Systems for the paper “Sparsity Invariance for Convex Design of Distributed Controllers” by Luca Furieri, Yang Zheng, Antonis Papachristodoulou and Maryam Kamgarpour.
This award — announced during this year’s Conference on Decision and Control in Cancun — recognizes the best paper published in the journal in the period 2020-2021.
This award — announced during this year’s Conference on Decision and Control in Cancun — recognizes the best paper published in the journal in the period 2020-2021.
07.09.2022

Ambizione: a boost for research careers
From avalanche management to spinal cord repair: the SNSF has awarded its Ambizione grants for 2022. It has selected the 83 best projects from a total of 473 submitted.
On average, they will receive 815,000 francs.
Since 2008, the SNSF has launched Ambizione calls to promote promising early-career researchers from Switzerland and abroad. Scientific staff at higher education institutions can also apply for Ambizione grants…
On average, they will receive 815,000 francs.
Since 2008, the SNSF has launched Ambizione calls to promote promising early-career researchers from Switzerland and abroad. Scientific staff at higher education institutions can also apply for Ambizione grants…
31.08.2022

Luca Furieri awarded SNSF Ambizione grant
Dr. Luca Furieri at EPFL’s School of Mechanical Engineering has been awarded an Ambizione grant for research at the intersection of machine learning and control theory.
The grant will enable Dr Furieri to pursue independent research on exploiting machine learning algorithms in safety-critical engineering infrastructures, including automated transportation systems and the continent-wide electricity grid. The awarded project is titled: “Reliable Machine Learning for Networked Control.”
The grant will enable Dr Furieri to pursue independent research on exploiting machine learning algorithms in safety-critical engineering infrastructures, including automated transportation systems and the continent-wide electricity grid. The awarded project is titled: “Reliable Machine Learning for Networked Control.”